Pareto-optimal lane-changing trajectory planning in mixed traffic
Citation
1 | @article{ |
Abstract
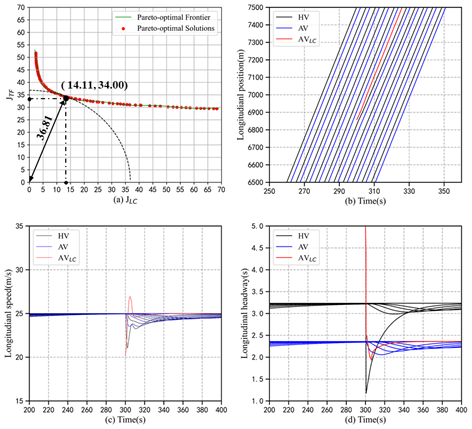
This paper applies the pareto-optimal concept to LC (lane-changing) motion planning in the presence of mixed traffic including manual and autonomous vehicles. Firstly, a multiobjective optimization problem is presented, in which the comfort, efficiency and safety of the LC vehicle and the surrounding vehicles are jointly modelled. Thereafter, the pareto-optimal solutions are obtained through employing the NSGA-II (Non-dominated Sorting Genetic -II) algorithm. Finally, the experiment section analyzes the (macroscopic and microscopic) lane-changing impact from a pareto-optimal perspective. Also, a comprehensive sensitivity analysis is conducted. Our results demonstrate that our algorithm could significantly reduce the lane-changing impact within its region, and the total costs are reduced in the range of 10.94% to 48.66%. This paper could be considered as a preliminary research framework for the application of the pareto-optimal concept. We hope this research will provide valuable insights into autonomous driving technology.
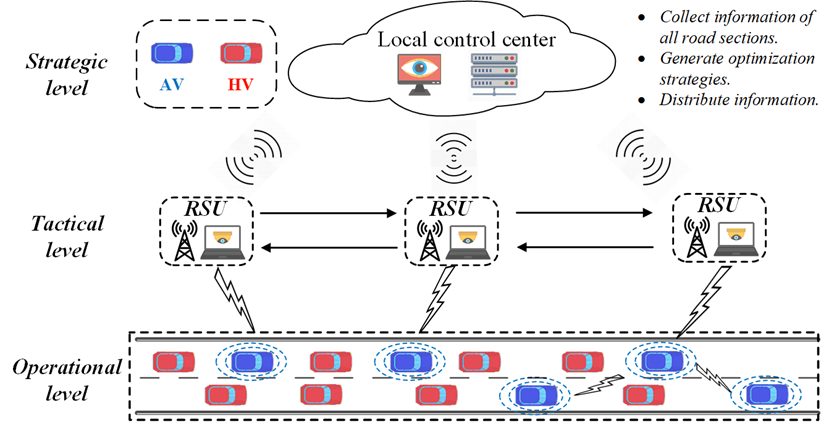
Framework
Results