Automatic lane-changing motion planning from self-optimum to local-optimum
Citation
1 | @article{ |
Abstract
Existing lane-changing (LC) algorithms in general prioritize self-interest above the benefits of others. We argue that an autonomous vehicle should be socially responsible during lane change without causing excessive impact on its surroundings. Thus, in this paper, we propose an LC algorithm that could generate a trajectory to optimize the overall benefits of the subject vehicle and others in its vicinity. This is mainly achieved by introducing Longitudinal Control Model to characterize the driving behaviors of neighboring vehicles, and drivers’ needs such as comfort, efficiency, and safety are simultaneously satisfied. We combine macro and micro comparative analysis to evaluate the advantage of our approach against existing algorithms. Our findings reveal that the vehicle controlled by our algorithm is capable of safely performing the LC maneuver while causing the least amount of impact. This is reflected in the decrease in total cost of all vehicles and the increase in traffic speed and throughput in its vicinity. In addition, we use HighD dataset for further validation and demonstrate that our algorithm is prac-tically sound. Application of this research can lead to improved autonomous driving technology.
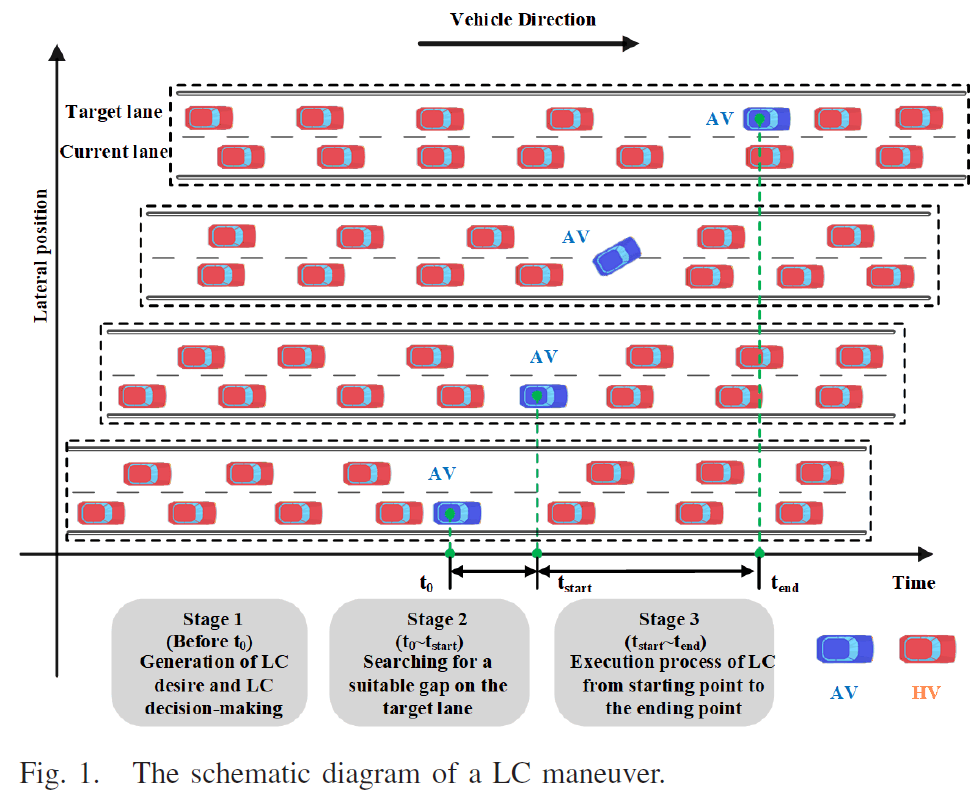
Framework
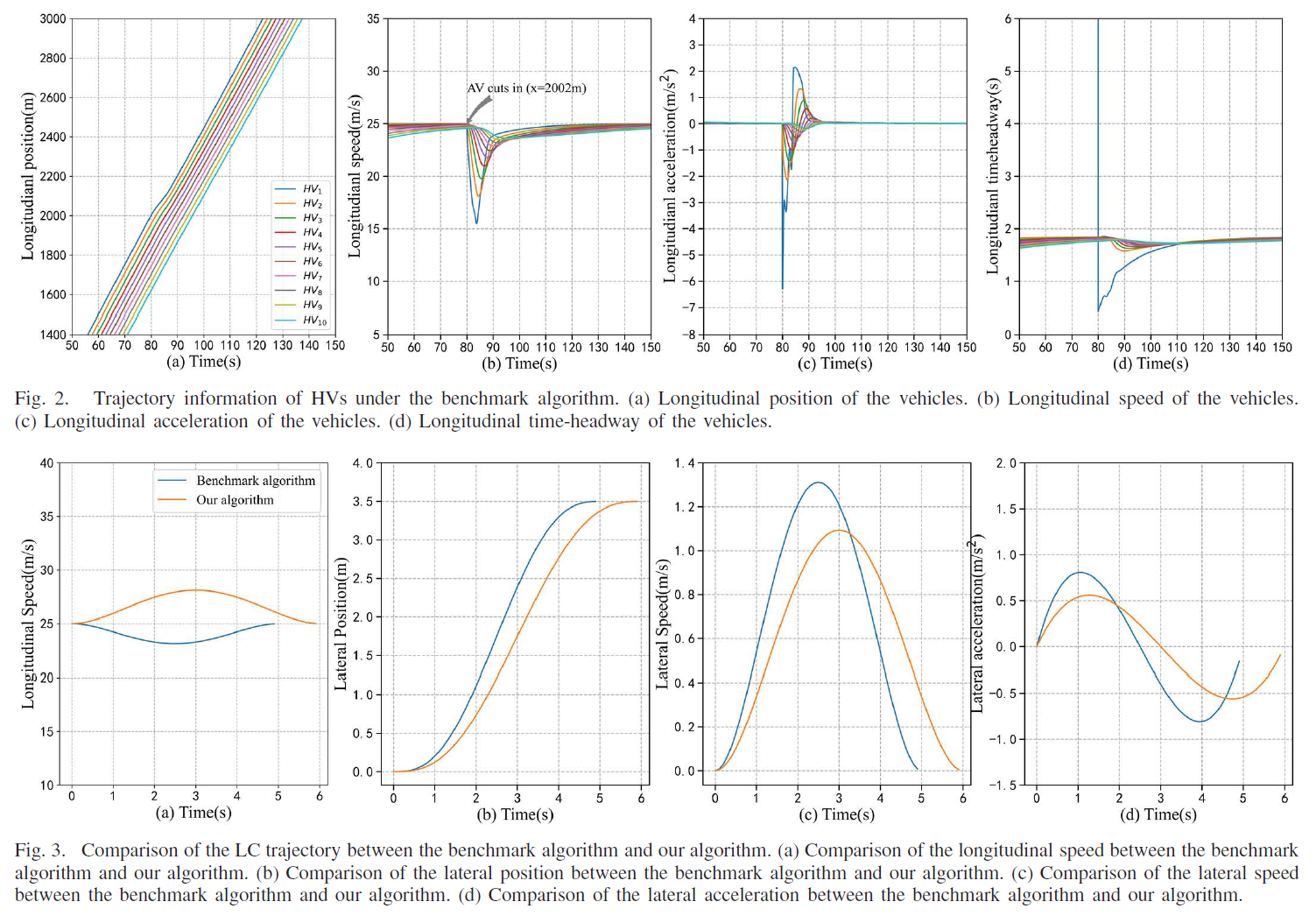
Results